Kerbal space program гайд
Содержание:
- Продольная и параллельная компоновка. Несъедобная спаржа.
- Описание изделия
- Перечень командных модулей
- Использование
- RCS
- Возможность стыковки
- Обтекатели, нужны или нет?
- Использование
- Rocket and Probe Design
- Orbiting and Docking
- Difficulty Settings meanings
- Effects of signal loss
- Функционал
- Создание планетоходов
- Operation
Продольная и параллельная компоновка. Несъедобная спаржа.
Поговорим о строении ракеты. Существуют два основных способа соединения ступеней — неправильный и армейский.
(I) Продольно — когда каждая ступень расположена за предыдущей. В реальности так, например, строится «Дельта IV» (та, которая НЕ heavy).
(II) Параллельно или пакетно — когда следующие (считаем сверху-вниз, помните?) ступени навешиваются сбоку, и в работу одновременно могут включаться все двигатели сразу нескольких ступеней. Примером может служить любая из огромного семейства «семёрок», хоть тот же Союз.
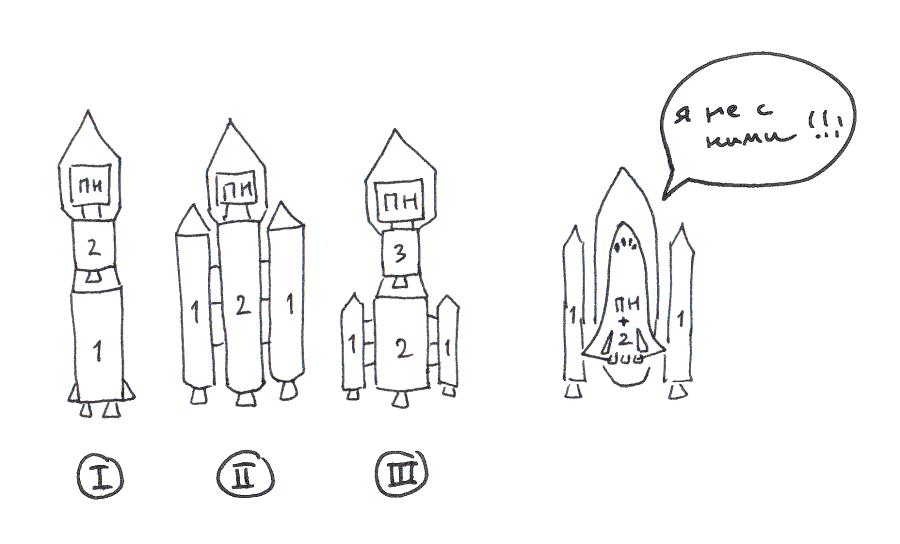
(1-2-3 — очередность отстрела ступеней)
У каждой компоновки есть свои плюсы и минусы:
Описание изделия
| Инженеры «Kerbal Motion» долго бились над вопросом, как извлечь из сложного машинного оборудования инструменты, которые в него уронили. После наблюдения за интерном, который чистил свои туфли в лаборатории, переворачивая их вверх дном и встряхивая, наша команда была поражена приступом вдохновения! Почему бы не переворачивать детали ракет вверх ногами и не встряхивать их? Манипулятор захвата отлично заполнил эту нишу и даже способен к подъему тяжелого машинного оборудования. С тех пор для него найдено множество других вариантов использования помимо тонкой операции экстракции инструмента. Также известен под названием «Когти!» |
Перечень командных модулей
Существует двадцать различных командных модулей в игре. Две капсулы для ракет, пять кабин для аэропланов и космопланов, два модуля для спуска на безатмосферные планеты, обзорный купол для станций или баз, восемь зондов для беспилотных кораблей, шасси для наземного дрона и внешнее кресло для планетоходов. Основное отличие между различными командными модулями — это их внешняя форма, масса и возможное количество экипажа. Исключение составляет внешнее командное кресло «EAS-1», которому нельзя назначить экипаж при запуске, в котором нет хранилища для научных данных и которое не может быть корневой деталью корабля.
Несмотря на наличие мест для экипажа, хранилище для попутчиков «PPD-10», отсек экипажа Mk1, отсек экипажа MK2, пассажирский отсек Mk3 и мобильная лаборатория MPL-LG-2 не предназначены для управления кораблём.
| Вид | Название | Размер | Цена() | Масса(т) | Макс.температура(K) | Прочность(м/с) | Прочность(м/с) | Вращающиймомент SAS(кН · м) | Пилот/УровеньSAS | Экипаж/расход | Ресурсы |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Кабина Mk1 | Маленький | 1 250(1 241) | 1,28(1,25) | 2 000(1 100) | 40 | 50 | 10 | 50 7,5 MP | |||
| Интегрированная кабина Mk1 | Маленький | 1 600(1 591) | 1,03(1,00) | 2 000(1 100) | 40 | 50 | 10 | 50 7,5 MP | |||
| Кабина Mk2 | Mk2 | 3 500(3 482) | 2,06(2,00) | 2 500(1 400) | 45 | 50 | 15 | + | 150 15 MP | ||
| Интегрированная кабина Mk2 | Mk2 | 3 500(3 470) | 2,10(2,00) | 2 500(1 400) | 45 | 50 | 15 | + | 150 25 MP | ||
| Кабина Mk3 | Mk3, Маленький | 10 000(9 880) | 3,90(3,50) | 2 700(1 500) | 50 | 50 | 40/40/20 | + | 500 100 MP | ||
| Командный отсек Mk1 | Маленький, Крошечный | 600(588) | 0,84(0,80) | 2 200(1 200) | 14 | 50 | 5 | 50 10 MP | |||
| Командный отсек Mk1-3 | Большой, Маленький | 3 800(3 764) | 2,72(2,60) | 2 400(1 400) | 45 | 50 | 15 | + | 150 30 MP | ||
| Посадочный модуль Mk1 | Маленький | 1 500(1 482) | 0,66(0,60) | 2 000(1 000) | 8 | 50 | 3 | 50 15 MP | |||
| Посадочный модуль Mk2 | Большой | 3 250(3 202) | 1,515(1,355) | 2 000(1 200) | 8 | 50 | 15 | + | 100 40 MP | ||
| Модуль PPD-12 «Купол» | Большой, Маленький | 3 200(3 188) | 1,80(1,76) | 2 000(1 000) | 8 | 50 | 9 | 200 10 MP | |||
| Внешнее командное кресло EAS-1 | Установленный радиально | 200 | 0,05 | 1 200 | 6 | 50 | — | — | |||
| Горизонд «Скиталец» | Маленький | 800 | 0,15 | 1 200 | 12 | 50 | — | 2,4 /мин(144 /ч) | 120 | ||
| Горизонд КУБ | Крошечный | 360 | 0,07 | 1 200 | 15 | 50 | — | 1,5 /мин(90 /ч) | 5 | ||
| Горизонд ГЕКС | Крошечный | 650 | 0,1 | 1 200 | 12 | 50 | 0,5 | 1 | 1,5 /мин(90 /ч) | 10 | |
| Горизонд ОКТО | Крошечный | 450 | 0,1 | 1 200 | 12 | 50 | 0,3 | 1,2 /мин(72 /ч) | 10 | ||
| Горизонд ОКТО2 | Крошечный | 1 480 | 0,04 | 1 200 | 12 | 50 | — | 2 | 1,8 /мин(108 /ч) | 5 | |
| Горизонд «Сухопутник» | Крошечный | 300 | 0,05 | 1 800 | 12 | 50 | — | — | 1,67 /мин(100 /ч) | 10 | |
| Горизонд ГЕКС2 | Маленький | 7 500 | 0,2 | 2 000 | 8 | 50 | 10 | 3 | 3,0 /мин(180 /ч) | 1 000 | |
| Блок удалённого управления RC-001S | Маленький | 2 250 | 0,1 | 2 000 | 9 | 50 | 0,5 | 3 | 3,0 /мин(180 /ч) | 15 | |
| Блок удалённого управления RC-L01 | Большой | 3 400 | 0,5 | 2 000 | 9 | 50 | 1,5 | 3 | 4,8 /мин(288 /ч) | 30 | |
| Блок управления дрона MK2 | Mk2 | 2 700 | 0,2 | 2 500 | 20 | 50 | 15/3/3 | 3 | 3,0 /мин(180 /ч) | 250 | |
| Зонд ОСМ | Маленький | 9 900(9 854) | 0,895(0,395) | 2 200 | 9 | 50 | 6 | 3 | 3,0 /мин(180 /ч) | 1 000 45 LF55 O | |
| Ступень ТММ | Маленький | 21 500(6 300) | 0,795(0,415) | 2 200 | 12 | 50 | 12 | 2 | 1,8 /мин(108 /ч) | 4 000 3 800 XE |
↑ Момент разный для разных осей — тангаж/рыскание/крен
Использование
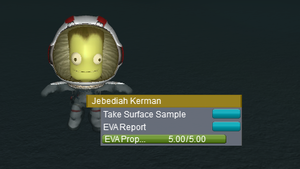
Джеб плавает и, одновременно, может выполнять эксперименты.
Работа вне летательного аппарата используется для проведения исследований вблизи него; Кербал вне корабля может выполнять некоторые действия, находясь около определенных объектов. Вот эти действия, которые могут быть выполнены:
- Упаковка прежде раскрытого парашюта для дальнейшего использования (щелчок правой клавишей мыши на парашюте → «Переупаковать» (англ. «Repack Chute»)).
- Починить сломанные шасси планетохода (щелчок правой клавишей мыши на шасси → «Отремонтировать шасси» (англ. «Repair Wheel»)). Для успеха ремонта шасси должно быть просто повреждено; взорванное или отсоединенное от аппарата шасси не может быть починено.
- Сложить или развернуть солнечные панели (щелчок правой клавишей мыши на панели → «Открыть панель/Сложить панель» (англ. «Extend Panel/Retract Panel»)), даже панели на других неконтролируемых аппаратах, то есть на зонде у которого закончился электрический заряд.
- Разместить Улучшенный складной флаг серии «A1» (часто называемый флагом) на своей текущей позиции (щелчок правой клавишей мыши на кербале → «Установить флаг» (англ. «Plant Flag»)). Это доступно только если кербал стоит на поверхности. Каждый кербал при выходе из летательного аппарата экипируется одним единственным флагом.
- Снять ранее размещенный флаг (щелчок правой клавишей мыши на флаге → «Снять флаг» (англ. «Remove Flag»)). Флаг помещается в инвентарь кербанавта и может быть установлен на новом месте.
- Прочесть надпись на флаге. Когда флаг находится в списке Станции слежения, можно видеть его название, переходить к нему или возвратить, но только кербал, находящийся вблизи флага — единственный способ прочитать содержимое надписи флага.
- Занять любой незанятый командный модуль или внешнее кресло управления «EAS-1»- не обязательно тот же самый, на котором он был запущен. До версии выход из летательного аппарата был единственным способом перемещения кербанавтов между аппаратами или между различными посадочными местами одного аппарата во время миссии. Однако, в версии была добавлена система для перемещения экипажа между жилыми отсеками любого летательного аппарата. Для этого щелкните левой клавишей мыши по люку и затем, в появившейся панели, выберите пункт «Перемещение» (англ. «Transfer») и имя нужного кербала.
- Выдать Доклад о работе вне аппарата. Доклады могут неоднократно генерироваться во время работы вне корабля, но только один из них за раз может быть перемещен на корабль для дальнейшей передачи.
- Собрать образец поверхности. Образцы поверхности могут быть собраны только в том случае, когда кербал стоит на поверхности небесного тела или плавает в жидкости небесного тела, и только один из них может быть перемещен на аппарат за раз.
- Собирать результаты научных экспериментов и сохранять их в командном отсеке. Если деталь позволяет свое повторное применение только при использовании вместе с лабораторией, такое действие также заблокирует эту деталь.
RCS
Это сложнее. Можно состыковаться без RCS, но это крайне сложно, поэтому на судне должны быть подруливающие устройства. Лучше всего их надеть прямо над центром масс. После нажатия кнопки в левом нижнем углу он выглядит как желто-черная сфера около середины вашего аппарата.
Кнопка под стрелкой покажет центр масс или CoM. Используйте радиальную симметрию x4, чтобы разместить четыре 4-ходовых двигателя RCS немного выше CoM. Они немного приподняты, потому что при сгорании двигателей CoM будет двигаться вверх к командному отсеку.
Прежде чем двигаться дальше, добавьте несколько баллонов с монотопливом, чтобы ваш RCS работал. Не забывайте о топливе. Теперь добавьте нижнюю ступень, и вы будете готовы к запуску!

Возможность стыковки
С вводом возможности стыковки появились различные новые возможности.
Дозаправка на орбите
У больших ракет, таких как межпланетные ракеты, может закончиться топливо еще до выхода за пределы сферы гравитационного влияния Кербина. Если это произошло, то на орбиту может быть отправлен какой-нибудь танкер, пристыкован и, затем топливо может быть перекачано с танкера на ракету. Для начала передачи топлива, нужно нажать Mod+щелчок правой клавишей мыши на обеих баках, которые должны передать/получить топливо, и щелкнуть курсором мыши на соответствующей панели, которая появляется.
Если возникает необходимость в частых заправках, стоит задуматься о постройке большого орбитального танкера или космической станции.
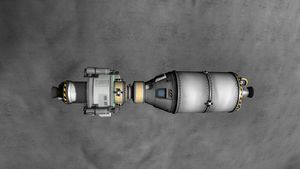
Сборка космического корабля на орбите

Трехкомпонентный космический корабль на низкой орбите вокруг Кербина.
Существует ограничение на величину постройки больших ракет в ЦВС. Что делает каждый в этом случае? Состыковывает множество космических аппаратов вместе для создания большой ракеты!
В отмененной программе НАСА «Созвездие» планировалось использовать такой метод для пилотируемых миссий к Луне и Марсу.
Отстыковываемые посадочные модули
Космический корабль с расстыковываемым Спускаемым аппаратом.
Этот метод был использован во время высадки человека на луну, и он также может быть полезен для кербалов. Когда Вы планируете посадочную миссию и имеете намерение возвратиться на Кербин, не берите все топливо для обратного рейса на поверхность каждой планеты, которую Вы посещаете. Отстыкуйте посадочный модуль с небольшим запасом топлива, достаточным для достижения поверхности и возвращения обратно, и повторно пристыкуйте его на этапе возврата, когда он возвратится обратно на орбиту. Таким образом Вы можете сэкономить много топлива, потому что посадочный модуль не должен переносить все топливо, потребное для возврата, на поверхность и обратно на орбиту.
Обтекатели, нужны или нет?
Обтекатель нужен, если потери от аэродинамического сопротивления больше, чем от дополнительной массы.
Если ваша полезная нагрузка больше похожа на ежа-мутанта, замотанного скотчем — даже не думайте, сразу прячьте эту хрень под обтекатель, а то стыдно. А одинокая капсула с парашютом отлично будет чувствовать себя и без оболочки. И да, если уж обтекатель используется — делайте его длинным и острым, это максимально уменьшит сопротивление.

Чем менее аэродинамична наша полезная нагрузка, тем позже стоит сбрасывать обтекатель. Но уже выше ≈30 километров он в любом случае становится лишним грузом.
Использование
Улучшенный модуль захвата в раскрытом состоянии.
УМЗ — основное средство захвата и перенаправления астероидов. Он также полезен для стыковки аппарата-к-аппарату или для обмена ресурсами с аппаратом или отделяющейся частью без стыковочного узла. Также как и со стыковочными узлами, ресурсами (жидкое топливо, электричество и т.д.) можно обмениваться с целью. И объекты, соединенные когтями, управляются вместе как единый объект. Это похоже на стыковочный узел, но без сложности выравнивания со стыковочным узлом цели. Кербал, захваченный при помощи УМЗ, станет подобным тряпичной кукле и может быть перенесен на борту аппарата.
Управление УМЗ — простое. Его состояние переключается между «вооружен» (англ. «Armed») или «разоружен» (англ. «Disarmed»). В то время как он «разоружен», он ведет себя подобно любой другой детали. После переключения состояния на «вооружен», приблизьтесь перпендикулярно целевой поверхности со скоростью не более нескольких м/с, и раскрытый коготь автоматически захватит что-нибудь, с чем он столкнется (или что-нибудь столкнется с ним), пристыковывая цель к текущему аппарату. Для расстыковки от цели, щелкните правой кнопкой мыши по УМЗ и выбирите «Освободить» (англ. «Release»).
Как только УМЗ присоединен, вращение его когтей может быть переключено. Вращение заблокировано каждый раз, когда «вооружен» и не присоединен, но может быть разблокировано правым щелчком мыши по УМЗ и выбором «Свободное вращение» (англ. «Free Pivot»).
Когда вращение свободно, маховики или Система ориентации могут использоваться для изменения тангажа и рыскания аппарата (относительно положения УМЗ) относительно цели, но не крена; когти вращаются, а не поворачиваются
Это жизненно важно при соединении с астероидами, поскольку двигатель должен быть нацелен непосредственно на центр массы, чтобы управлять астероидом при его перемещении
Обратите внимание на то, что средства управления могут чувствовать себя противоположными; будет перемещаться противоположный конец аппарата от когтя. Отметьте также, что диапазон движения, которое обеспечивает вращение, ограничен окружностью, подобно самому УМЗ, по существу представляя собой коническую область.
После выравнивания аппарата команда «Блокировка вращения» (англ
«Lock Pivot») может использоваться для фиксирования ориентации аппарата относительно захваченной цели. Обратите внимание, что, даже при блокировке, при достаточной поперечной силе центр может отклониться, хотя, как только действие силы прекратиться, он отклонится обратно к своей ранее заблокированной ориентации. Также возможно с помощью ранее созданных групп действий “разоружить” УМЗ в процессе присоединения, не отпуская его − просто визуальный эффект.
Ошибки, влияющие на изделие

Сразу после прикрепления.
Существует возможность получения небольшого сбоя от игры при соединении с «когтем» таким образом, чтобы он был на не активном космическом корабле. Кербин исчезает сразу после подключения «когтей» и повреждения физики, поскольку аппарат начинает падать даже на орбите. Существует вероятность, что это просто исчезает ландшафт, если своевременно переключиться на другой аппарат. «Danny2462» сделал ролик об этой ошибке, в котором он использовал два «когтя» на одном кербале, находящемся в активном «когте», но кербал и «коготь» на активном аппарате вовсе не обязательны.
Чтобы избежать такого поведения, игрок должен переключиться на аппарат с «когтем» перед соединением.
Rocket and Probe Design
- Cheat Sheet A handy collection of mathematical equations and calculation examples
- Basic Rocket Design by Senshi
- Basic Probe And Satellite Building By Nova Storm
- Intermediate Rocket Design
- Advanced Rocket Design by Vincent McConnell and Kosmo-not
- Asparagus Staging a method to design very fuel-efficient rockets
- Rocket Assembly Making the most of sub-assemblies, by shadowraven
- What’s with all the math? A non-rigorous explanation of the math in KSP
- Recovering Rocket Stages Recovering those usually-expended stages for more funds!
- Making a Small Satellite Great for littering space with. By ReadingChicken
- How to make real rockets with making history
- How to Make Effective Space Station Launch Vehicles by Noah of Dryve Aerospace
Breaking Ground tutorials
- Quick notes regarding parts
- Tutorial:Making a Breaking ground Propeller Creating a tutorial using Breaking grounds DLC
- Tutorial:Deployable Science How to deploy and use the new parts to collect science
Orbiting and Docking
Orbiting Fundamentals
- How to Get into Orbit a primer on how to get into your first orbit
- Basic Orbiting (Math) by Entroper
- Walkthrough for Ye Compleat Beginner
- Advanced Orbiting by Entroper
- Advanced Earth-Moon Aldrin Cycler Orbit
- Land at the Space Center by an anonymous person from Albany, New York
- Performing a gravity assist
- Camera view How to see yourself in space
- Geosynchronous Orbit (Math)
Orbital Rendezvous
- Tutorial: The Berry Maneuver Simple instructions on how to get to another planet or moon without all the waiting (it is not necessary to wait for your target planet to reach you) by Gregory Berry
- Tutorial 1 and tutorial 2 (should be merged)
- A detailed discussion on how to meet objects in orbit, including how to synchronize orbits/phases
Docking
- Tutorial: Docking Is Easy (if you follow this tutorial) Docking is easy if you understand the navball. Waiting for a close intersection is not necessary. This tutorial is simple and detailed instructions to dock without frustration. By Gregory Berry
- Basic Docking by PD
- Orbital Docking with the Kergena Target Vehicle
Difficulty Settings meanings
| Setting | When OFF | When ON | Setting on the difficulty level | |||
|---|---|---|---|---|---|---|
| Easy | Normal | Moderate | Hard | |||
| Activate CommNet | All ships have full control and can plot maneuver nodes wherever they are. If they have an antenna they can transmit science from anywhere. | Ships behave differently depending on the CommNet status, see below | Off | On | On | On |
| Required signal for control | When out of range, probe-only ships go into partial control (same as hibernation) where they can only lock to available SAS axis and throttle at 0 or 100% | When out of range, probe-only ships will completely lose control | – | Off | Off | Off |
| Plasma blackout | Atmospheric re-entry has no effect on CommNet | Atmospheric re-entry lowers the signal strength, you can hover the network icon in the telemetry bar to see how many | – | Off | Off | Off |
| Range Modifier | The value of this slider is a multiplier value that is applied to the power levels of all antennae | – | 1.00 | 0.80 | 0.65 | |
| DSN Modifier | The value of this slider is a multiplier value that is applied to the power level of the DSN Network | – | 1.00 | 1.00 | 1.00 | |
| Occlusion Modifier, Vac | The value of this slider is a multiplier value that is applied to the effective size of atmosphereless bodies that can block signals between antennas. | – | 0.90 | 1.00 | 1.00 | |
| Occlusion Modifier, Atm | The value of this slider is a multiplier value that is applied to the effective size of bodies with atmospheres that can block signals between antennas. | – | 0.75 | 0.85 | 1.00 | |
| Enable Extra Groundstations | Only one ground station has DSN: the Kerbal Space Center. Other groundstations have a default antenna rating of ~36k*. | Kerbin has many groundstations that share the Tracking Station’s DNS rating. | – | On | On | On |
Based on circumstantial evidence, the default DSN disabled groundstation antenna rating is approximately 36k, but CommNet prefers extra hops to the DSN on Kerbin, if a signal path is available.
The CommNet ranges of DSN disabled groundstations are:
| 5k | 500k | 5M | 2G | 10G | 15G | 100G | |
|---|---|---|---|---|---|---|---|
| 36k | 13.42km | 134.16km | 424.26km | 8.49Mm | 18.97Mm | 23.24Mm | 60Mm |
Effects of signal loss
Depending on your difficulty settings, several effects occur when the CommNet signal is lost, either from the KSC or a probe control point. This could be due to either electricty loss, out of CommNet range, or an antenna destruction. There is also a setting where you can force the signal to blackout when entering a body’s atmosphere too fast.
Manned without a pilot: You will lose the ability to create maneuver nodes, or delete existing ones
Probe, require control unchecked: Your probe will lose three capabilities : rotation control (roll, yaw, pitch), precise thrust control (only 0 or maximum), and the ability to create or remove maneuver nodes. If your probe is capable of locking a maneuver axis through SAS, it is advised to create a maneuver node before transmission blackout (passing behind a body) to allow the ship to perform the maneuver.
Probe, require control checked: You will completely lose control of your probe. Either wait for it to go back to a CommNet range, or send a ship with a probe control point capability to do general maneuvers (deploy solar panels, precise control,…).
SAS isn’t transmitted by the KSC or a probe control point. If you cannot SAS, either look if your probe is controllable (batteries, CommNet range) or has a pilot onboard. The level of SAS depends on the ship itself (probe SAS levels or pilot level).
Функционал
Главный экран станции слежения подобен Общему обзору карты, с важным дополнением — списком в левой части экрана, показывающим (аппараты, кербанавтов находящихся вне летательных аппаратов или Улучшенные складные флаги серии А1) всех миссий в игре. Наверху экрана ряд кнопок, которые можно использовать для отфильтровывания различных типов миссии; по-умолчанию — показываются все, за исключением обломков. Единственный тип может быть отобран при использовании левой кнопки мыши, а другие типы могут быть добавлены или удалены из выбора, при использовании правой кнопки мыши. Информация и физическая статистика о выбираемом объекте доступны через кнопки справа, подобно как в Общем обзоре карты; летательный аппарат имеет пока только доклад экипажа (если пилотируемый), в то время как у тел есть краткое описание.
С помощью Центра игрок может выбирать различные миссии (читай: КА, космонавты, установленные флаги, но не планеты, далее употребляется с тем же значением) и:
- Получать контроль (Fly), при этом происходит переход из Центра к выбранному объекту;
- Забирать (Recover) приземлившиеся/приводнившиеся на Кербин объекты (также действие доступно и с интерфейса полёта); при этом все очки науки складируются в общую копилку, а космонавты снова перемещаются во вкладку «Доступные» в Центре набора космонавтов;
- Прекращать (Terminate) миссии, с последующим уничтожением КА и/или убийством космонавтов; соответственно, теряются все заработанные за данный полёт очки науки.
Все доступные на данный момент миссии отображаются списком слева, доступны фильтры. Также в ЦС присутствует «База знаний» — дополнительная информация о данном корабле, его команде, облетаемом космическом теле и т.д.
Создание планетоходов
Основы
Для того, чтобы транспортное средство было определено как планетоход, он должен содержать по крайней мере один командный модуль и несколько колес. В качестве источника электроэнергии строго не рекомендуется использовать командный модуль, так как его внутренней энергии хватит чуть больше, чем на несколько минут езды. Для возможности прямого движения, колеса транспортного средства должны быть установлены параллельно друг другу в ЦВС. Во время управления планетоходом, колеса достаточно умны для движения в направлении, соответствующем клавишам управления.
Для работы шасси требуется большое количество электроэнергии, так что планетоход должен содержать в себе приличное количество энергии. Батареи могут временно обеспечить планетоход энергией, но стабильные источники энергии в виде солнечных панелей или Радиоизотопного термоэлектрического генератора «PB-NUK» также необходимы для постоянного функционирования планетохода. Часто солнечные панели предпочтительней из-за своей низкой массы, но выдвижные солнечные панели могут быть легко уничтожены аэродинамическим сопротивлением при быстрой езде планетохода в атмосфере.
При присоединении радиально к плоскому корпусу, такому как «Модель «RoveMate» от «Probodobodyne», множества встраиваемых шасси, важно отключить «угловую симметрию» (англ. «angle snap») в меню сборки
Иначе, ни в одной точке планетохода, кроме точного центра, шасси не присоединится как положено и всегда будет располагаться под углом к конструкции.

Шасси для планетоходов: модели «3», «1» и «2» с кербалом для сравнения размеров.
| Вид | Название | Размер | Цена() | Масса(т) | Макс.температура(K) | Прочность(м/с) | Прочность(м/с) | Энергопотребление(/с) | Максимальнаяскоростьэлектродвигателя(м/с) | Тормозной момент(кНм) |
|---|---|---|---|---|---|---|---|---|---|---|
| Колесо «Движ-S2» | Установленный радиально | 300 | 0,05 | 1 200 | 20 | 20 | 1,0 | 12 | 0,34 | |
| Колесо «Движ-M1» | Установленный радиально | 450 | 0,075 | 1 200 | 50 | 50 | 2,5 | 34 | 2 | |
| Усиленное колесо TR-2L | Установленный радиально | 760 | 0,105 | 1 200 | 100 | 80 | 3,5 | 58 | 3 | |
| Колесо «Движ-XL3» | Установленный радиально | 1 200 | 1,25 | 1 200 | 150 | 200 | 5,0 | 15,5 | 30 |
Особенности
Для стабильности и легкости в управлении, планетоход должен быть относительно широким с низким расположением центра масс. Что делает его намного устойчивее для планетохода от опрокидывания при ускорении, торможении или повороте на скорости. Планетоходы становятся менее устойчивыми при уменьшении силы тяжести, таким образом, планетоход, который является абсолютно устойчивым при управлении вокруг Космического Центра Кербина может легко перевернуться на Минмусе, например. Другая опасность тел с низкой силой тяжести, подобных Минмусу состоит в том, что планетоходы с малой массой не могут обеспечить достаточное давление на свои шасси для сцепления с поверхностью и ускорения. Одно из решений этой проблемы состоит в том, чтобы использовать направленные вверх двигатели Системы ориентации для того, чтобы прижать планетоход к поверхности.
Либо, вместо этого, чтобы пытаться избежать полного переворота, планетоход может быть спроектирован для самостоятельного исправления. На маленьких планетоходах выдвигающиеся Посадочные опоры «LT-1» могут использоваться для переворота их обратно, если перевернутся вверх тормашками. Большие планетоходы в мирах с низкой силой тяжести могут помочь себе встать при помощи двигателей Системы ориентации. Планетоходы могут также переворачивать себя с помощью момента вращения от маховиков или своего командного модуля.
Наиболее сложные планетоходы — практически маленькие космические корабли, использующие ракетные двигатели для ухода с орбиты и самостоятельной посадки или даже самостоятельного возврата на орбиту и перевозящие множество кербанавтов или другие большие полезные нагрузки.
Operation
Planes usually take advantage of jet engines, which require air intakes to breathe in atmospheric oxygen, allowing them to forego carrying the weight of oxidizer needed by . Jet engines are fuel-efficient, thus great distances can easily be covered within atmosphere.
For a given set of engines at a given throttle level, there is a minimum amount of intake air which must be constantly collected by the air intakes. Collecting more air does not improve performance, but falling below the minimum amount results in one or more engines suffering a “flameout” and shutting down. Planes often have jet engines paired in bilateral symmetry, but it’s rare both engines flameout simultaneously. Thrust then becomes asymmetrical about the plane’s center of mass, applying turning torque that can easily cause a “flat spin” like a frisbee. Planes often have difficulty regaining control and thus may land in multiple pieces, if any.
Altitude is vitally important to operating jet engines. At lower altitudes, intake air is more available but drag also is greater, limiting top speed. As altitude increases, there is decreasing intake air available as well as less drag. Decreasing drag allows higher speeds which allows more intake air to be collected. However, increasing throttle position to gain speed increases the total required intake air to avoid a flameout. There is also decreasing lift, requiring a plane to pitch higher to avoid falling, which may decrease the efficiency of air intakes. A jet plane’s ability to balance these competing demands defines its operational ceiling. On Kerbin, the highest that even supersonic jets can meet minimum intake requirements is around 40 km.
Planes operating above the range of jet engines require secondary propulsion, typically rocket engines. Such planes are called “spaceplanes” as in the name of the Spaceplane Hangar. Atmospheric drag still prevents achieving orbit unless and until the plane is able to fully clear the atmosphere. On Kerbin this is around 70 km.
Flight records
The fastest known plane demonstrated, in , a top speed of about 2377 m/s relative to Kerbin’s surface — just short of Mach 7. At this speed it is possible to circumnavigate Kerbin in about 29 minutes at an altitude of 40 km. For comparison the speed of a stable Low Kerbin Orbit at 70 km (outside the atmosphere) is only 2296 m/s. Because the craft at that speed is faster than the orbital velocity of that height the craft naturally tends to rise.